|
Being able to reason about the physical contacts between
hands and objects is crucial in understanding hand-object manipulation. However, despite the efforts in accurate 3D annotations in hand
and object datasets, there still exist gaps in 3D hand and object reconstructions. Recent works leverage contact maps to refine inaccurate
hand-object pose estimations and generate grasps given object models.
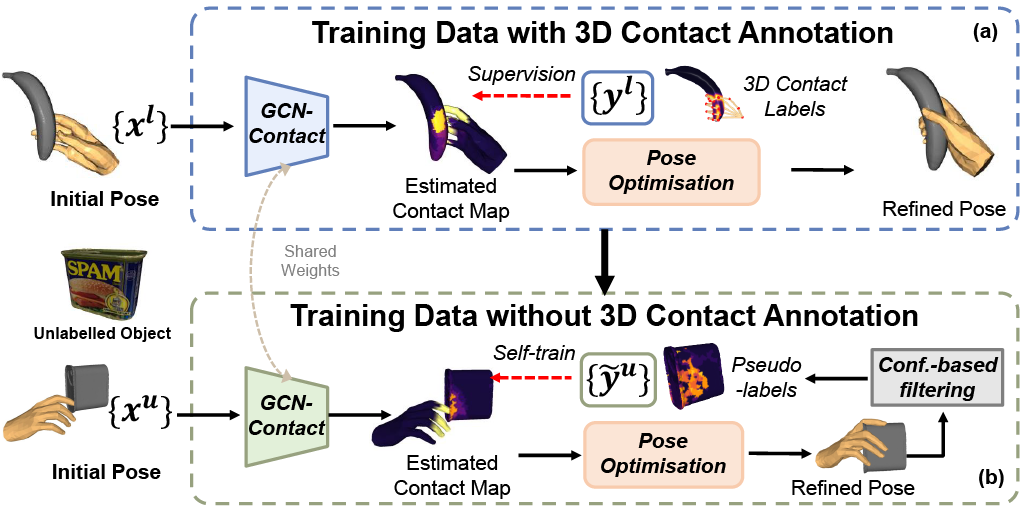
However, they require explicit 3D supervision which is seldom available
and therefore, are limited to constrained settings, e.g., where thermal
cameras observe residual heat left on manipulated objects. In this paper, we propose a novel semi-supervised framework that allows us to
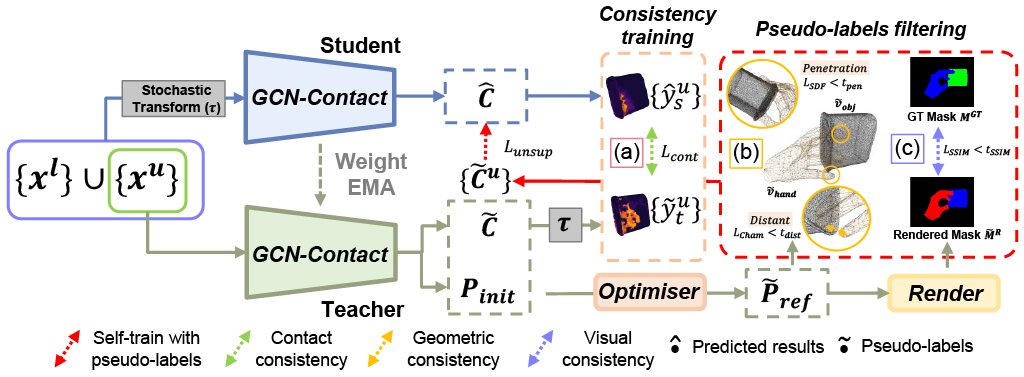
learn contact from monocular videos. Specifically, we leverage visual and
geometric consistency constraints in large-scale datasets for generating
pseudo-labels in semi-supervised learning and propose an efficient graph-
based network to infer contact. Our semi-supervised learning framework
achieves a favourable improvement over the existing supervised learning
methods trained on data with ‘limited’ annotations. Notably, our proposed model is able to achieve superior results with less than half the
network parameters and memory access cost when compared with the
commonly-used PointNet-based approach. We show benefits from using
a contact map that rules hand-object interactions to produce more accurate reconstructions. We further demonstrate that training with pseudo-
labels can extend contact map estimations to out-of-domain objects and
generalise better across multiple datasets.
|